Siemens PLC controla robôs Yamaha
Tempo de liberação:2023-01-28 16:00:06
Este artigo apresenta a estratégia de controle do robô Yamaha controlado pela Siemens PLC, usando a porta IO externa para definir a palavra de comando, para que o PLC possa se comunicar com o robô e instruir o robô a concluir a ação correspondente.
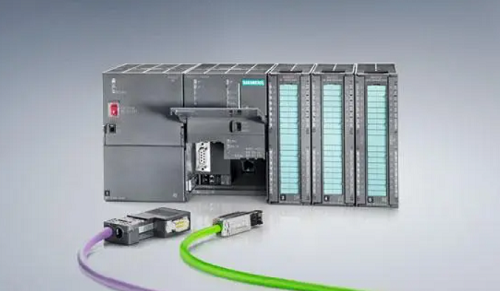
Siemens S7-300PLC é um PLC de grande e médio porte amplamente utilizado em nosso país agora, a pesquisa sobre ele e a estratégia de controle de robôs periféricos no campo da automação de dispositivos é de grande importância. Neste artigo, com base na pesquisa e produção da linha de baterias de lítio, a comunicação e o controle do Siemens S7300PLC e do robô Yamaha são concluídos, e a pesquisa e desenvolvimento dos dois processos principais de barra de aço e estampagem no processo do dispositivo de bateria de lítio são concluídos.
1. Projeto geral de hardware
A conexão do controlador do robô Siemens S7-300PLC e YAMAHA precisa conectar o sinal de partida do robô, sinal de parada de emergência, sinal de falha e sinal de reset, através dos quatro grupos de sinais e conexão PLC pode alcançar os requisitos básicos do robô de controle. O PLC está conectado ao robô. Geralmente, o PLC é usado como o lado da instrução de envio e o robô é usado como o lado da instrução de recepção. Para atingir o propósito do robô de controle PLC caminhando para cada ponto, a necessidade de estabelecer a comunicação de sinal de PLC e IO do robô.
Combinado com a pesquisa tecnológica de procedimentos de colocação e estampagem de aço no processo de dispositivo de bateria de lítio, obtém-se que os pontos de caminhada do robô não ultrapassarão 16 pontos. De acordo com o cálculo dos pontos pontuais por 8421, os pontos de conexão do robô e do PLC são 4 pontos. O robô padrão PNP é selecionado para ser conectado à Siemens. A conexão do sinal inclui duas partes: uma parte é o sinal de partida, parada de emergência, falha e reset; Uma parte é a linha de comunicação entre o PLC e o robô em quatro pontos; Existem oito conjuntos de sinais.
2. Concepção geral do software
Estratégia de controle de software para investigação do robô, método de comando PLC para implementar todo o controle. Tome o robô de empilhamento como exemplo, o robô envia o sinal 1001 inquérito após o retorno, o robô recebe o sinal de acordo com os requisitos de engenharia, o robô é instruído a ir para a orientação do alvo, o sinal de orientação do alvo é (0001 - 1011) um total de 9 pontos, obtenha a posição do ponto robô se move no lugar, juntos no lugar após enviar um sinal para informar o robô no lugar, O robô controla a ação de outros periféricos (cilindros, motores, etc.) e diz ao robô para retornar à posição após o término da ação. Depois que o robô retorna à posição, ele continua a esperar pela instrução de configuração. Um loop de ação termina.
Através da comunicação e controle entre a Siemens S7-300PLC e o robô Yamaha, a pesquisa e desenvolvimento de barra de aço e estampagem de dois processos-chave no processo do dispositivo de bateria de lítio é concluída. PLC e robô através do método de ligação final de transmissão de sinal usado no campo do dispositivo de bateria, tem um bom papel de demonstração; Pode ser usado em outra sequência de dispositivo de bateria, outro PLC de referência e método de controle de robô e estratégia de controle, pode terminar a maior parte do robô de controle PLC até o ponto de trabalho, tem um bom efeito de promoção.
-
 202306-01
202306-01A principal função e composição do software de configuração do MCGS Tong - edição incorporada de estado são apresentadas
A principal função do software de configuração embutido MCGS1. Interface de operação visual simples e flexível: toda a interface de desenvolvimento visual e chinesa é adotada, que atende aos h···
-
 202305-12
202305-12The hard disk light of Advantech industrial computer 610L is not on
Hard disk fault: The hard disk may be faulty, causing the hard disk indicator to be off. You can try to restart the computer. If it still does not light up, check whether the hard disk is recognized b···
-
 202302-01
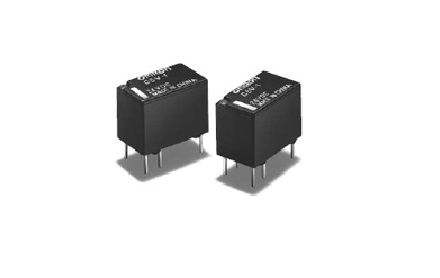
202302-01Pontos de manutenção do relé da Omron
1. A superfície da casca do relé Omron usado na instalação deve estar livre de arranhões, rachaduras e danos. Em caso de danos graves, o relé intacto com as mesmas especificações deve ser subs···
-
 202302-13
202302-13Etapas de deteção de comunicação do Mitsubishi PLC
Quando estiver pronto para se comunicar através do AJ71QE71, execute o procedimento de ping no modo MS-DOS antes de iniciar a comunicação com o GPPW da Mitsubishi PLC para ver se a conexão está c···
-
 202512-25
202512-25Robôs colaborativos de alta proteção ESTUN IP68: excelência em ambientes extremos
Em ambientes industriais onde os robôs enfrentam contaminação por óleo, poeira pesada ou salpicaduras líquidas, a automação padrão muitas vezes atinge seus limites. ESTUN aborda essa lacuna cr···


 +86 13811814778
+86 13811814778 +86 13811814778
+86 13811814778
 Edifício 26, Comunidade Liyuan, Distrito de Chaoyang, Pequim, China
Edifício 26, Comunidade Liyuan, Distrito de Chaoyang, Pequim, China